

En la siguiente guia te explicaremos paso a paso como manejar tu programa Interactive Control 5s, para que puedas grabar secuencias espectaculares y a la vez reproducirlas una y otra vez con un intervalo de tiempo que tu desees lo cual simulara una secuencia industrial.
MATERIALES NECESARIOS
- Brazo Robitico Zenent 5 Servos totalmente ensamblado. Encuentralo AQUI

Brazo Robotico 5 Servomotores, tres servomotores sg5010 y dos servomotores sg90, un manipulador robotico diseñado para experimentar gran fuerza. - Protoboard. Encuentralo AQUI

Protoboard - Arduino uno. Encuentralo AQUI

Arduino uno - Jumpers. Encuentralo AQUI

Jumpers
CONEXIONES
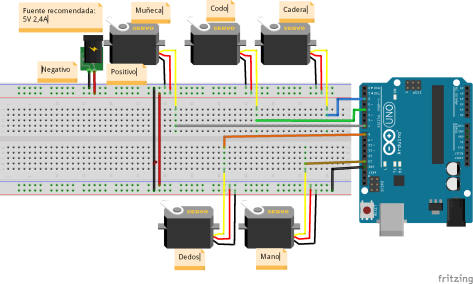
Esta es la conexion que recomendamos para nuestro Brazo Robotico 5 Servos, tener en cuenta que no se debe conectar los servomotores directamente a la tarjeta arduino, la tarjeta no los soportara, recomendamos usar una fuente de 5 V y 2,4A como minimo.
EL PROGRAMA
-
Cargar el codigo LIFA_BASE a tu arduino mediante «Arduino IDE».

Si no sabes como cargar codigo en tu Arduino te invitamos a aprender mas haciendo click en el siguiente boton:

El siguiente es un Link donde encontraras el codigo LIFA_BASE para que lo cargues a tu Arduino : CODIGO LIFA_BASE.
2. Indicadores de la funciona actual que se ejecuta.
![]()
El programa maneja 4 entornos basicos, el entorno principal es donde el brazo robotico permanecera en 90º en casi todos sus servomotores si se inicia por primera vez, es al cual volvera despues de ejecutar cualquier entorno especial.
El entorno Mouse esta creado para que puedas manipular tu brazo robotico con tu mouse, y dos sencillas teclas, mas adelante explicaremos como es el proceso para su control.
El entorno Manual es en el cual podras manipular su brazo robotico con total presicion gracias a sus diales en pantalla, lo recomendamos para crear cualquier grabacion.
En entorno Semi-Industrial podras poner a tu brazo robotico a que realice una secuencia cuantas veces necesites.
3. Controles principales.

Serial Port: Se despliega el menu y escogemos el puerto COM a donde se conecto nuestro Manipulador Robotico
Emulacion Semi-Industrial: Ejecutas la emulacion semi-industrial, no se puede parar el programa mientras se ejecuta esta opcion bajo ningun motivo (TENER CUIDADO O DAÑARAS TU ARDUINO)
Control Mouse: Controlaras tu Brazo Robotico con tu mouse y dos teclas (X y Z)
Control Manual: Manualmente mediante diales o sliders en pantalla dependiendo la version del programa que tengas manejaras tu Brazo Robotico mientras grabas espectaculares secuencias.
4. Controles de Secuencia Semi-Industrial

Archivo Secuencia Semi-Industrial: click en la carpeta para cargar la secuencia previamente grabada.
Numero de Secuencias: Veces que se ejecutara la secuencia Semi-Industrial.
Segundos Entre Secuencia: Segundos que esperara el programa para ejecutar cada Secuencia.
5. Control por Mouse

Ancho Pixeles : Ancho de tu pantalla expresado en pixeles, Puedes visualizar el tamaño de tu pantalla en Escritorio – Click Derecho – Resolucion de pantalla – Resolucion.
Alto Pixeles: Alto de tu pantalla expresado en pixeles, Puedes visualizar el tamaño de tu pantalla en Escritorio – Click Derecho – Resolucion de pantalla – Resolucion.
Angulo Maximo Rotacion: Angulo maximo al cual rotara la base de tu Brazo Robotico.
Angulo Maximo Codo: Angulo maximo al cual rotara el codo de tu brazo robotico.
Angulo Minimo Codo: Angulo minimo al cual girara tu brazo robotico.
Angulo Minimo Muñeca: Angulo minimo al cual girara la muñeca de tu brazo robotico.
Angulo Maximo Muñeca: Angulo maximo al cual girara la muñeca tu brazo robotico.
Angulo Avance Muñeca: Tus servos Avanzan a cierto angulos por cada movimiento de tu mouse, aqui escoges que tan rapido quieres que avance, recuerda que entre mas rapido avance, mas brusco se movera.
Angulo avance Mano: Funciona igual que el angulo de avance muñeca.
Play, Record, Load, Save: Controles de gracacion y reproduccion de secuencias.
timeout (ms): Tiempo que tardara en ejecutarse tu secuencia, cuando la carges y la estes reproduciendo.
STOP: Control de parada del entorno Mouse.
6. Control Manual
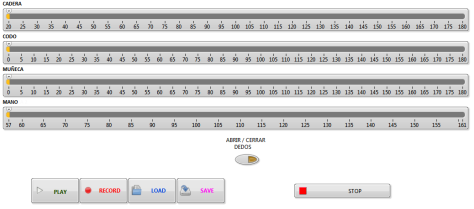
Cadera, Codo, Muñeca, Mano, Abrir/Cerrar Dedos: Son los controles manuales de tu brazo robotico en la pantalla, muevelos para que tu brazo robotico se mueva armonicamente.
Play, Record, Load, Save: Controles de grabacion y reproduccion del programa, presiona Record y mueve tu brazo robotico, todos los movimientos se estaran grabanando en tiempo real, presiona Save para grabar los movimientos realizados.
7. Semi-Industrial.
Encontraras un solo indicador el cual te indicara el numero de secuencias ya ejecutadas, al entrar en este entorno no se recomienda para el programa, podras dañar tu arduino.
NOMBRE SERVOMOTORES

DESCARGA EL PROGRAMA Y COMENTANOS
1. Programa Original.
2. Instalador.
Adquiere tu Brazo Robotico 5 Servos















