

www.RoboticadeColombia.com
A continuación encontraras una guía completa donde te enseñamos como puedes controlar tu nuevo brazo robótico de 5 servos que adquiriste.
MATERIALES NECESARIOS
- Brazo Robótico Zenent 5 Servos totalmente ensamblado. Encuéntralo AQUI

Brazo Robótico 5 Servomotores, tres servomotores sg5010 y dos servomotores sg90, un manipulador robótico diseñado para experimentar gran fuerza. - Protoboard. Encuéntrala AQUI

Protoboard - Arduino uno. Encuéntrala AQUI

Arduino uno - Jumpers. Encuentrala AQUI

Jumpers - Modulo Bluetooth (HC-06 o HC-05) Encuentrala AQUI

Modulo Bluetooth HC-06 - Celular con sistema operativo Android

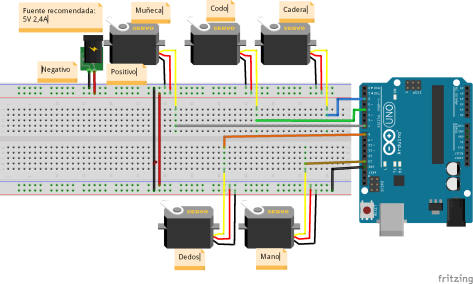
CONEXIONES
Esta es la conexión que recomendamos para nuestro Brazo Robótico 5 Servos, tener en cuenta que no se debe conectar los servomotores directamente a la tarjeta Arduino, la tarjeta no los soportara, recomendamos usar una fuente de 5 V y 2,4A.
Esta es la conexión recomendada para el modulo bluetooth, en este ejemplo usaremos un modulo HC-06, tener en cuenta al momento de cargar el código que los cables TX y RX del Arduino deben estar desconectados.

CODIGO
Da clic en el siguiente botón para descargar los códigos de Arduino, los cuales cargaras por medio del IDE de Arduino a tu placa.

Si no sabes como cargar códigos a tu Arduino por medio del IDE de Arduino, sigue el siguiente link y te enseñaremos como!
¿Como Cargar Codigos al Arduino?
CONEXION POR BLUETOOTH Y APLICATIVO ANDROID
Para este proyecto y muchos otros vamos a utilizar la app «Arduino Bluetooth Controller».

1. Descargamos desde la Play Store la aplicacion » Arduino Bluetooth Controller «

Los Comandos son:
- a = + Rotacion s = – Rotacion
- e = + Codo d = – Codo
- r = + Muñeca f = – Muñeca
- z = + Mano x = – Mano
- c = Abrir Dedos v = Cerrar Dedos
Pasos:
- Activar Bluetooth.

Activar Bluetooh - Seleccion Modulo bluetooth.

Seleccion Modulo bluetooth. - Seleccionar Modo Control.

Seleccionar Modo Control - Seleccionamos las opciones de Control.

Seleccionamos las opciones de Control. - Ajustar los Comandos de Acuerdo a las Imagenes.


- Dar atrás en la aplicación y si se hicieron todos los pasos correctamente podrán iniciar a mover su Brazo Robótico desde su dispositivo Android.
NOMBRE DE LOS SERVOMOTORES

Adquiere tu Brazo Robótico 5 Servos

